XML和YAML文件的读取
视频讲解如下:
当前系列所有demo下载地址:
https://github.com/GaoRenBao/OpenCv4-Demo
不同编程语言对应的OpenCv版本以及开发环境信息如下:
语言 | OpenCv版本 | IDE |
C# | OpenCvSharp4.4.8.0.20230708 | Visual Studio 2022 |
C++ | OpenCv-4.5.5-vc14_vc15 | Visual Studio 2022 |
Python | OpenCv-Python (4.6.0.66) | PyCharm Community Edition 2022.1.3 |
XML和YAMl文件操作方式好像基本都一样,所以,下面演示就不做区分了,读取的内容为上一章节写入的yaml文件
C#版本
C#版本需要安装“OpenCvSharp4”、“OpenCvSharp4.runtime.win”两个库才行。不然会报错。
如果需要使用“ BitmapConverter.ToBitmap”操作,则需要追加安装“OpenCvSharp4.Extensions”库。
C#版本可以参考官方代码:OpenCvSharp.Tests\core\FileStorageTest.cs
读取效果如下:

演示代码如下:
using OpenCvSharp;
using System;
namespace demo
{
internal class Program
{
private static void log(string a)
{
Console.WriteLine(a);
}
private static void log2(string a)
{
Console.Write(a);
}
static void Main(string[] args)
{
// opencv3:FileStorage.Mode.Read
// opencv4:FileStorage.Modes.Read
using (var fs = new FileStorage("test.yaml", FileStorage.Modes.Read))
{
if (fs.IsOpened() == false)
{
Console.WriteLine("文件打开失败.");
Console.Read();
return;
}
using (var node = fs["frameCount"])
{
log($"{node.Name},{node.Type},{node.ReadInt()}\r\n");
}
using (var node = fs["calibrationDate"])
{
log($"{node.Name},{node.Type},{node.ReadString()}\r\n");
}
using (var node = fs["cameraMatrix"])
{
log($"{node.Name}");
foreach (var a in node)
{
if (a.Type == FileNode.Types.Seq)
{
log2($"\t{a.Name}:[");
foreach (var b in a) { log2($"{b.ReadInt()},"); }
log($"]");
}
else
{
string str = ((a.Type == FileNode.Types.String) ? a.ReadString() : a.ReadInt().ToString());
log($"\t{a.Name},{a.Type},{str}");
}
}
}
using (var node = fs["distCoeffs"])
{
log($"{node.Name}");
foreach (var a in node)
{
if (a.Type == FileNode.Types.Seq)
{
log2($"\t{a.Name}:[");
foreach (var b in a) { log2($"{b.ReadDouble()},"); }
log($"]");
}
else
{
string str = ((a.Type == FileNode.Types.String) ? a.ReadString() : a.ReadInt().ToString());
log($"\t{a.Name},{a.Type},{str}");
}
}
}
using (var node = fs["features"])
{
log($"{node.Name}");
foreach (var a in node)
{
if (a.Type == FileNode.Types.Map)
{
foreach (var b in a)
{
if (b.Type == FileNode.Types.Seq)
{
log2($"\t{b.Name}:[");
foreach (var c in b) { log2($"{c.ReadDouble()},"); }
log($"]");
}
else
{
string str = ((b.Type == FileNode.Types.String) ? b.ReadString() : b.ReadInt().ToString());
log($"\t{b.Name},{b.Type},{str}");
}
}
}
else
{
string str = ((a.Type == FileNode.Types.String) ? a.ReadString() : a.ReadInt().ToString());
log($"\t{a.Name},{a.Type},{str}");
}
}
}
}
Console.Read();
}
}
}
C++版本
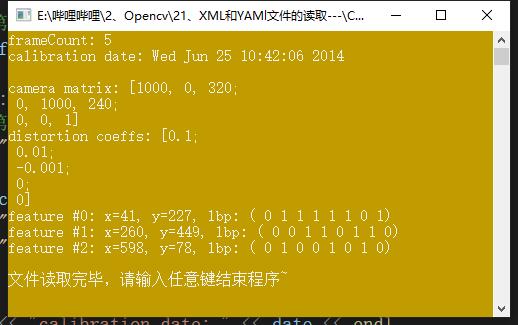
C++版本采用的是毛星的代码,运行读取结果如下:
演示代码如下
#include "opencv2/opencv.hpp"
#include <time.h>
using namespace cv;
using namespace std;
int main()
{
//改变console字体颜色
system("color 6F");
//初始化
FileStorage fs2("test.yaml", FileStorage::READ);
// 第一种方法,对FileNode操作
int frameCount = (int)fs2["frameCount"];
std::string date;
// 第二种方法,使用FileNode运算符> >
fs2["calibrationDate"] >> date;
Mat cameraMatrix2, distCoeffs2;
fs2["cameraMatrix"] >> cameraMatrix2;
fs2["distCoeffs"] >> distCoeffs2;
cout << "frameCount: " << frameCount << endl
<< "calibration date: " << date << endl
<< "camera matrix: " << cameraMatrix2 << endl
<< "distortion coeffs: " << distCoeffs2 << endl;
FileNode features = fs2["features"];
FileNodeIterator it = features.begin(), it_end = features.end();
int idx = 0;
std::vector<uchar> lbpval;
//使用FileNodeIterator遍历序列
for (; it != it_end; ++it, idx++)
{
cout << "feature #" << idx << ": ";
cout << "x=" << (int)(*it)["x"] << ", y=" << (int)(*it)["y"] << ", lbp: (";
// 我们也可以使用使用filenode > > std::vector操作符很容易的读数值阵列
(*it)["lbp"] >> lbpval;
for (int i = 0; i < (int)lbpval.size(); i++)
cout << " " << (int)lbpval[i];
cout << ")" << endl;
}
fs2.release();
//程序结束,输出一些帮助文字
printf("\n文件读取完毕,请输入任意键结束程序~");
getchar();
return 0;
}
Python版本
Python版本和前面两个版本差异比较大,采用的是pyyaml库,而不是FileStorage,FileStorage在Python里面没找到相关资料,只找到pyyaml,Python如何生成和前面两个版本的yaml,暂时没搞明白,但是基本上都是能操作yaml文件的。
pyyaml库的可以通过执行以下命令来安装
pip install pyyaml -i https://mirror.baidu.com/pypi/simple
关于load的使用,可以参考:https://github.com/yaml/pyyaml/wiki/PyYAML-yaml.load(input)-Deprecation
我这边没有全部都读取出来,只读取了部分进行演示。
读取效果如下:

演示代码如下:
# pip install pyyaml -i https://mirror.baidu.com/pypi/simple
import yaml
fs = open('test.yaml', 'r', encoding='utf-8')
cont = fs.read()
# print(cont)
# load的使用:https://github.com/yaml/pyyaml/wiki/PyYAML-yaml.load(input)-Deprecation
x = yaml.load(cont, Loader=yaml.BaseLoader)
print(x['calibrationDate'])
print(x['cameraMatrix']['args'])
print(x['features']['x'])
print(x['features']['y'])
print(x['features']['lbp'])
print(x['frameCount'])


