霍夫变换HoughLinesP边缘检测与线性矢量
视频讲解如下:
当前系列所有demo下载地址:
https://github.com/GaoRenBao/OpenCv4-Demo
不同编程语言对应的OpenCv版本以及开发环境信息如下:
语言 | OpenCv版本 | IDE |
C# | OpenCvSharp4.4.8.0.20230708 | Visual Studio 2022 |
C++ | OpenCv-4.5.5-vc14_vc15 | Visual Studio 2022 |
Python | OpenCv-Python (4.6.0.66) | PyCharm Community Edition 2022.1.3 |
本章节给大家讲讲如何对图像进行霍夫变换HoughLinesP边缘检测与线性矢量操作。当前代码主体还是使用毛星云的demo,C#和Python都是在C++版本的基础上转换过来的。
运行效果对比如下:
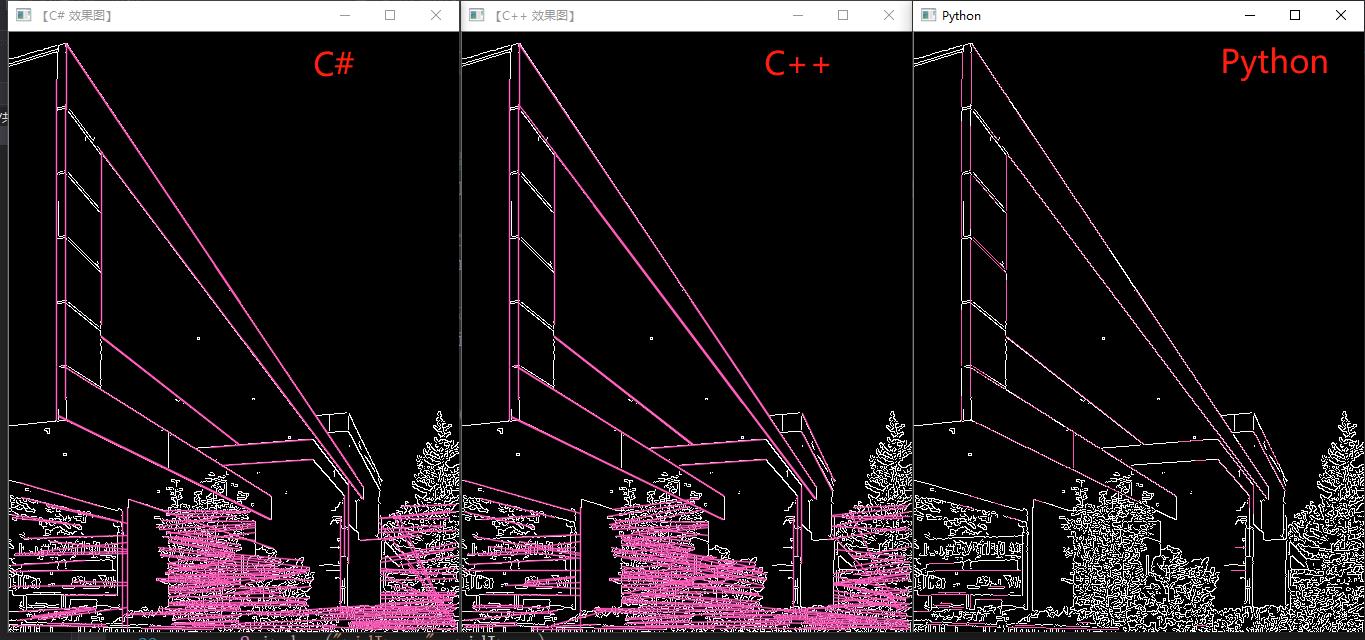
从最终效果可以可以看出,C#和C++的效果基本一致,但是Python的效果明显比另外两个版本差太多了。同样参数的情况下,Python的线条明显少很多。
C#版本代码
C#版本需要安装“OpenCvSharp4”、“OpenCvSharp4.runtime.win”两个库才行。不然会报错。
如果需要使用“ BitmapConverter.ToBitmap”操作,则需要追加安装“OpenCvSharp4.Extensions”库。
using OpenCvSharp;
namespace demo
{
internal class Program
{
static void Main(string[] args)
{
//【1】载入原始图和Mat变量定义
Mat srcImage = Cv2.ImRead("../../../images/home.jpg");
//临时变量和目标图的定义
Mat midImage = new Mat();
Mat dstImage = new Mat();
//【2】进行边缘检测和转化为灰度图
//进行一此canny边缘检测
Cv2.Canny(srcImage, midImage, 50, 200, 3);
//转化边缘检测后的图为灰度图
Cv2.CvtColor(midImage, dstImage, ColorConversionCodes.GRAY2BGR);
//【3】进行霍夫线变换
//定义一个矢量结构lines用于存放得到的线段矢量集合
LineSegmentPoint[] lines = Cv2.HoughLinesP(midImage, 1, Cv2.PI / 180, 80, 50, 10);
//【4】依次在图中绘制出每条线段
for (int i = 0; i < lines.Length; i++)
{
Point p1 = lines[i].P1;
Point p2 = lines[i].P2;
Cv2.Line(dstImage, p1, p2, new Scalar(186, 88, 255), 1, LineTypes.AntiAlias);
}
//【5】显示原始图
Cv2.ImShow("【原始图】", srcImage);
//【6】边缘检测后的图
Cv2.ImShow("【边缘检测后的图】", midImage);
//【7】显示效果图
Cv2.ImShow("【C# 效果图】", dstImage);
Cv2.WaitKey(0);
}
}
}
C++版本代码
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
using namespace std;
int main()
{
//【1】载入原始图和Mat变量定义
Mat srcImage = imread("../images/home.jpg"); //工程目录下应该有一张名为1.jpg的素材图
Mat midImage, dstImage;//临时变量和目标图的定义
//【2】进行边缘检测和转化为灰度图
Canny(srcImage, midImage, 50, 200, 3);//进行一此canny边缘检测
// opencv3:CV_GRAY2BGR
// opencv4:COLOR_GRAY2BGR
cvtColor(midImage, dstImage, COLOR_GRAY2BGR);//转化边缘检测后的图为灰度图
//【3】进行霍夫线变换
vector<Vec4i> lines;//定义一个矢量结构lines用于存放得到的线段矢量集合
HoughLinesP(midImage, lines, 1, CV_PI / 180, 80, 50, 10);
//【4】依次在图中绘制出每条线段
for (size_t i = 0; i < lines.size(); i++)
{
Vec4i l = lines[i];
// opencv3:CV_AA
// opencv4:LINE_AA
line(dstImage, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(186, 88, 255), 1, LINE_AA);
}
//【5】显示原始图
imshow("【原始图】", srcImage);
//【6】边缘检测后的图
imshow("【边缘检测后的图】", midImage);
//【7】显示效果图
imshow("【C++ 效果图】", dstImage);
waitKey(0);
return 0;
}
Python版本代码
import cv2
import numpy as np
# 【1】载入原始图和Mat变量定义
srcImage = cv2.imread('../images/home.jpg') # 工程目录下应该有一张名为1.jpg的素材图
# 【2】进行边缘检测和转化为灰度图
midImage = cv2.Canny(srcImage, 50, 200, 3) # 进行一此canny边缘检测
# 转化边缘检测后的图为灰度图
dstImage = cv2.cvtColor(midImage, cv2.COLOR_GRAY2BGR)
# 【3】进行霍夫线变换
lines = cv2.HoughLinesP(midImage, 1, np.pi / 180, 80, 50, 10)
for line in lines:
x1, y1, x2, y2 = line[0]
cv2.line(dstImage, (x1, y1), (x2, y2), (186, 88, 255), 1)
# 【5】显示原始图
cv2.imshow("srcImage", srcImage)
# 【6】边缘检测后的图
cv2.imshow("midImage", midImage)
# 【7】显示效果图
cv2.imshow("Python", dstImage)
cv2.waitKey(0)
cv2.destroyAllWindows()


