发布imu和gps消息 - (ROS学习笔记7)
转载:https://blog.csdn.net/Tansir94/article/details/81385812
CSDN原文:https://blog.csdn.net/gs1069405343/article/details/88644518
一、创建工作空间
mkdir -p imu_gps/src #创建工作空间
catkin_make #编译
source devel/setup.bash #将新的工作空间加入到环境变量中
echo $ROS_PACKAGE_PATH #输入如下指令查看环境变量
二、创建IMU_data发布程序包
首先下方链接地址中是sensor_msgs/Imu.msg的消息格式:
http://docs.ros.org/jade/api/sensor_msgs/html/msg/Imu.html
cd imu_gps/src #进入工作空间中的src
#创建一个名为'imu_gps_publish'的新程序包,这个程序包依赖于std_msgs、roscpp和rospy:
catkin_create_pkg imu_gps_publish stdmsgs roscpp rospy
此时整个工作空间的文件架构如下:
imu_gps #工作空间
build
devle
src
imu_gps_publish
include
src
CMakeLists.txt
package.xml
CMakeLists.txt
在imu_gps_publish文件夹下的src文件中新建imu_gps_data.cpp
cd imu_gps_publish/src
touch imu_gps_data.cpp
将如下代码复制到新建的cpp文件中
// Step 1: Include Library Headers:
//发布imu的数据到IMU_data
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
int main(int argc, char** argv)
{
// Step 2: Initialization:
ros::init(argc, argv, "imu_gps");
ros::NodeHandle n;
ros::Publisher IMU_pub = n.advertise<sensor_msgs::Imu>("IMU_data", 20);
ros::Rate loop_rate(50);
while(ros::ok())
{
sensor_msgs::Imu imu_data;
imu_data.header.stamp = ros::Time::now();
imu_data.header.frame_id = "base_link";
//四元数位姿,所有数据设为固定值,可以自己写代码获取IMU的数据,,然后进行传递
imu_data.orientation.x = 0;
imu_data.orientation.y = -1;
imu_data.orientation.z = -5;
imu_data.orientation.w = 6;
//线加速度
imu_data.linear_acceleration.x = 0.01;
imu_data.linear_acceleration.y = 0.02;
imu_data.linear_acceleration.z = 0.03;
//角速度
imu_data.angular_velocity.x = 0.05;
imu_data.angular_velocity.y = 0.06;
imu_data.angular_velocity.z = 0.07;
IMU_pub.publish(imu_data);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}更改imu_gps_publish下的CMakeLists.txt文件,添加如下两行
add_executable(${PROJECT_NAME}_node src/imu_gps_data.cpp)
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)返回工作空间编译:
cd
cd imu_gps
catkin_make
编译成功,运行结果如下:
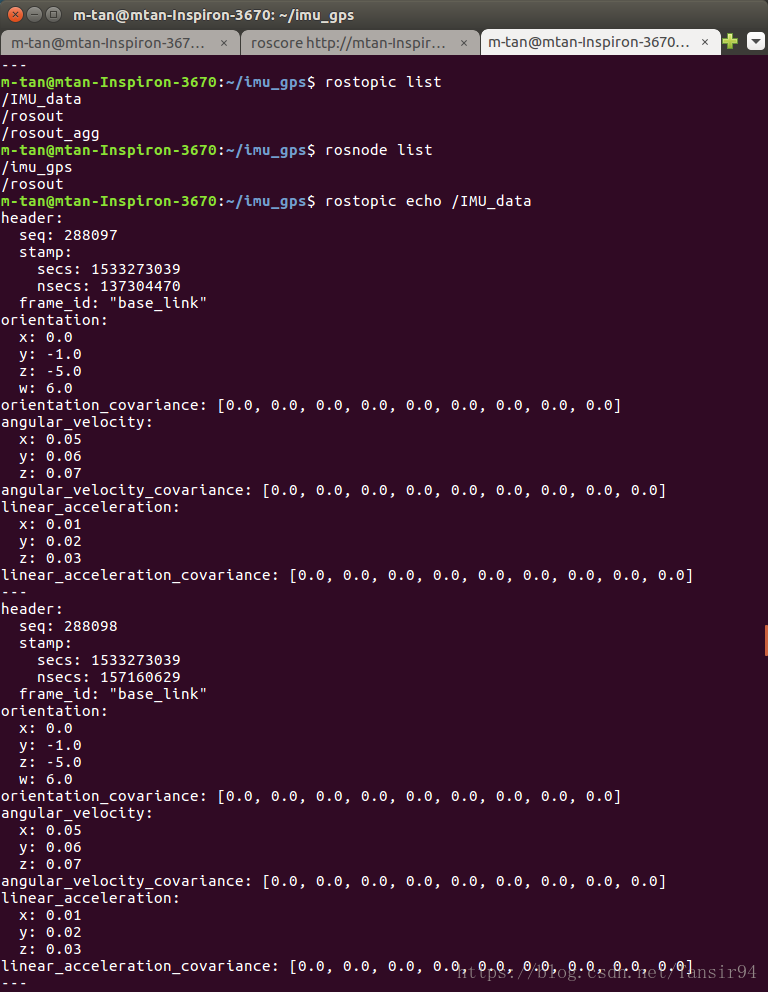
现在尝试运行节点:打开roscore,运行节点程序
roscore
rosrun imu_gps_publish imu_gps_publish_node
在新终端中查看节点和话题以及发布的消息如下图:
注:若是在CMakeList.txt中添加的两行为:
add_executable(imu_gps src/imu_gps_data.cpp)
target_link_libraries(imu_gps ${catkin_LIBRARIES})重新编译运行时,启动节点的命令为
rosrun imu_gps_publish imu_gps
可见,add_executable意思为添加可执行的文件,imu_gps或是${PROJECT_NAME}_node指的是运行的节点的名称。
三、在IMU_data发布的基础上加入GPS数据发布
GPS消息类型文档:
http://docs.ros.org/jade/api/sensor_msgs/html/msg/NavSatFix.html3
在imu_gps_data.cpp文件中添加gps数据消息的发布,最终代码:
// Step 1: Include Library Headers:
//发布imu的数据到IMU_data
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
#include <sensor_msgs/NavSatFix.h>
int main(int argc, char** argv)
{
// Step 2: Initialization:
ros::init(argc, argv, "imu_gps");
ros::NodeHandle n;
//定义IMU数据的消息发布
ros::Publisher IMU_pub = n.advertise<sensor_msgs::Imu>("IMU_data", 20);
//定义GPS数据的消息发布
ros::Publisher GPS_pub = n.advertise<sensor_msgs::NavSatFix>("GPS_data", 20);
ros::Rate loop_rate(10);
while(ros::ok())
{
//imu消息的赋值和发布
sensor_msgs::Imu imu_data;
imu_data.header.stamp = ros::Time::now();
imu_data.header.frame_id = "base_link";
//四元数位姿,所有数据设为固定值,可以自己写代码获取IMU的数据,,然后进行传递
imu_data.orientation.x = 0;
imu_data.orientation.y = -1;
imu_data.orientation.z = -5;
imu_data.orientation.w = 6;
//线加速度
imu_data.linear_acceleration.x = 0.01;
imu_data.linear_acceleration.y = 0.02;
imu_data.linear_acceleration.z = 0.03;
//角速度
imu_data.angular_velocity.x = 0.05;
imu_data.angular_velocity.y = 0.06;
imu_data.angular_velocity.z = 0.07;
//发布IMU
IMU_pub.publish(imu_data);
//gps消息的赋值和发布
sensor_msgs::NavSatFix gps_data;
gps_data.header.stamp = ros::Time::now();
gps_data.header.frame_id = "base_link";
//gps_data.status="working";
gps_data.latitude=36.6555;
gps_data.longitude=117.2656;
gps_data.altitude=40.5;
GPS_pub.publish(gps_data);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}添加工作空间环境变量,运行节点:
source devel/setup.bash
rosrun imu_gps_publish imu_gps
查看节点和消息:
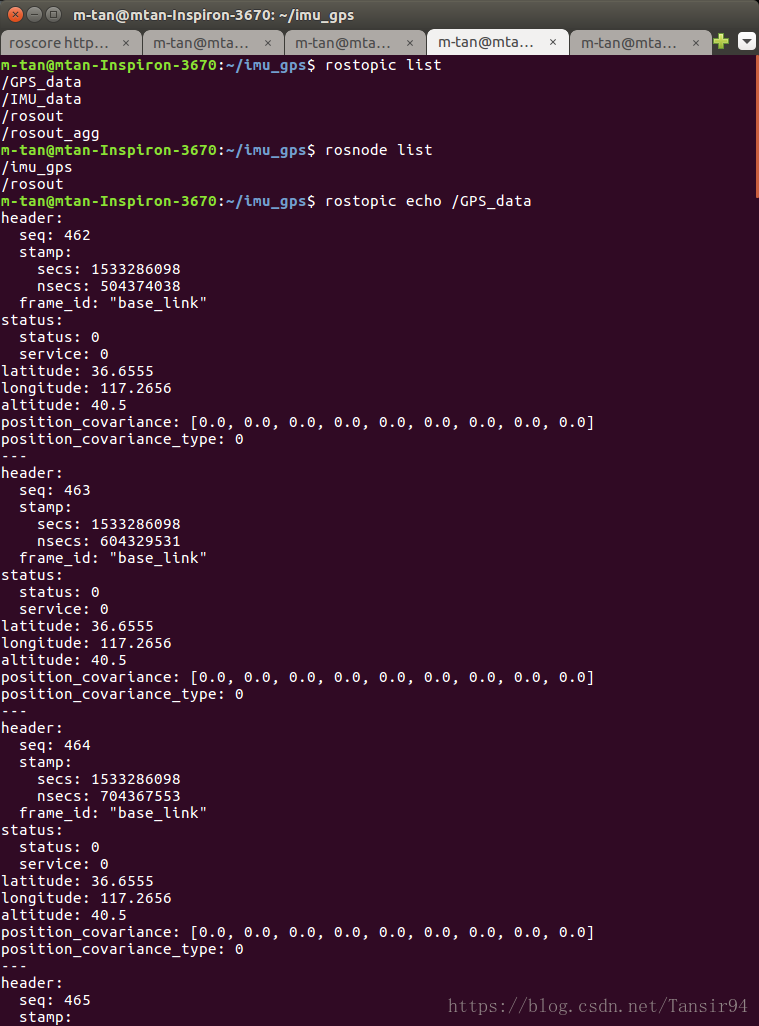
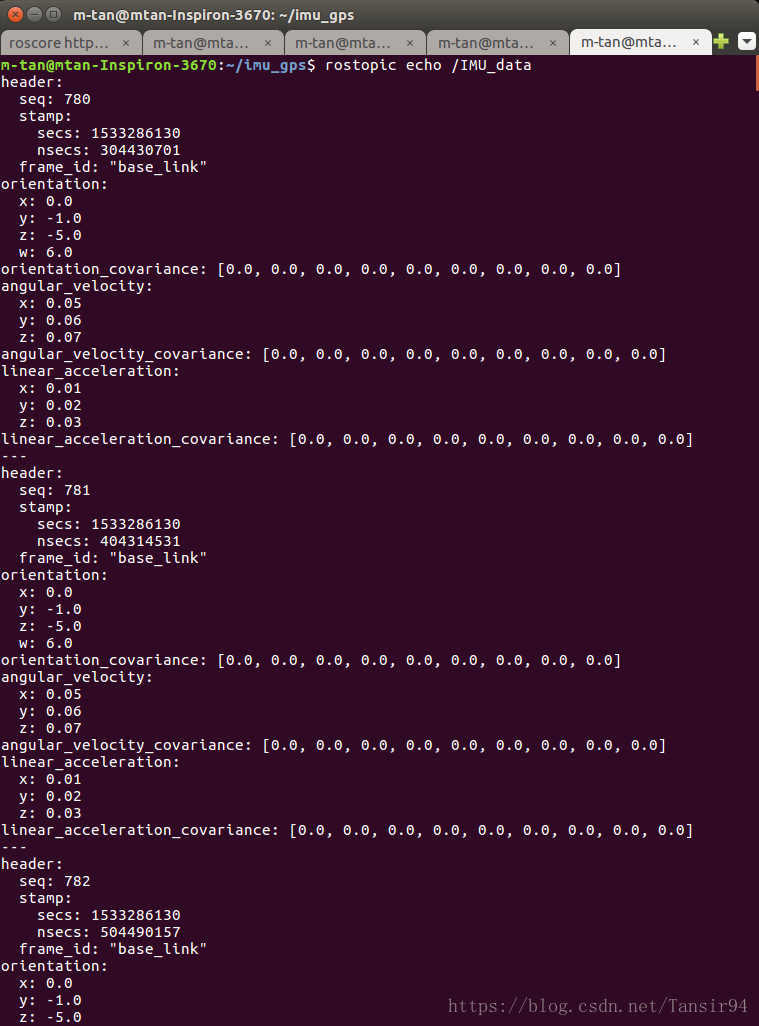
最终,实现了在一个节点中的IMU和GPS的数据发布。


